


abaqus如何定义只受拉而不受压的弹簧-凯发网站
在interaction功能模块或property功能模块中都可以通过special菜单定义点质量(pointmass)、转动惯量(rolaryinertia)、弹簧(spring)、阻尼器(dashpot)等工程特征,其区别仅在于:在interaction功能模块中定义的工程特征是属于装配件(assembly)的,而在prop-erty 功能模块中定义的工程特征则是属于部件(part)的。
如何定义只受拉而不受压的弹簧?
只受拉而不受压弹簧实际上是一种非线性弹簧,即力和弹簧长度变化量之间的关系不是线性的。非线性弹簧无法在abaqus/cae中直接定义,只能通过修改inp文件实现。为避免在修改inp文件时出现错误,可以首先在abaqus/cae中定义线性弹,生成inp文件后,再在inp文件中将其改为非线性弹簧。
以连接模型中两点的弹簧为例(即springa弹簧单元),说明其操作方法:在interac-tion 功能模块中单击菜单 special-springs/dashpots→create,将类型设为 connect two points,选择两个模型中的两个点,将springstifness(弹簧刚度)设为一个任意的值,例如1000。在生成的inp文件中可以看到以下相关语句:
*element,type=springa,elset =springs/dashpots-1 -spring1,
parta-1.195,panb-1.167**
*spring,elset = springs/dashpots-1-spring
1000.
其中的 springs/dashpots-1-spring是abaqus/cae自动给出的弹簧单元集合名称,par-ta-1.195和partb-1.167是弹簧所连接的两个节点,*spring语句下面必须要有一个空行(这是springa弹簧单元的规定),1000是线性弹簧的刚度。接下来将上面从*spring到1000的3行语句替换为非线性弹的定义,例如:*spring,elset =springs/dashpots-1 -spring, nonlinear
-1800,-0.1
-400,-0.04
0,0
0,1e
其中的 nonlinear表示非线性弹,数据行中的四对数据表示的是力和弹长度变化量之间的非线性关系(前面是力,后面是位移),长度变化量为负值时,力为负值,表示弹簧受压时缩短;长度变化量为正值时,力为0,表示弹簧不受拉。
在提交abaqus/explicit 分析时,为何在sta 文件中看到以下错误信息?
* * * error: mass is not defined for the rigid bodies with the reference nodes listed below , but notall translational degrees of freedom are constrained at the reference node, abaqus/explicit now re-quires rigid bodies to have a non - zero, mass unless translational constraints are applied with the * bound.ary option (see the abaqus analysis users manual). nodes that are part ofa rigid body do not requiremass individually but the rigid body as a whole must possess mass, unless constrgints are used, 7o remedythis error, either add translational constraints to the reference nodes with the *-boundary option or addmass using the * mass option, whichever is appropriate to obtain the desired response.(在刚体参考点上既没有定义质量,也没有约束其所有平动自由度)
** * error : rotary inertia for the rigid bodies with the reference nodes listed below are not positivedefinite. abaqus/explicit now requires rigid bodies to have positive definite rotary inertia unless rotationalconstrain:s are applied with the * boundary option ( see the abaqus analysis users manual). nodes thatare part ofa rigid body do not require mass and inertia individually, but the rigid body as a whole must pos.sess positive definite rotary inertia unless constraints are used. to remedy this error, either add rotational con.straints to the reference nodes with the * boundary option or, add inertia using the * rotary inertiaoplion,whichever is appropriate to obtain the desired response.(刚体参考点上的转动惯量是非正定的)
上述错误信息已经给出了明确的提示:在进行动态分析时,如果刚体参考点的3个平动自由度没有被全部约束住(即刚体可以发生平动),就需要在建模时在刚体参考点上定义整个刚体的质量(mass);如果刚体参考点的3个转动自由度没有被全部约束住(即刚体可以发生转动),就需要在刚体参考点上定义整个刚体的转动惯量(rotaryinertia)。
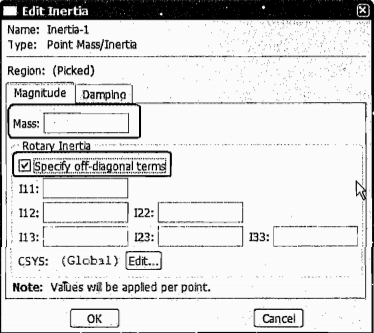
图7-7 输人质量和转动惯量
根据上面的提示信息,解决方法包括添加适当的边界条件(注意要符合工程实际),在刚体参考点上定义质量和转动惯量。
定义质量和转动惯量的方法是:在interaction功能模块或property 功能模块中,单击菜单special→inertia→create,将类型设为pointmass/iner-iia,选择刚体参考点,然后在如图7-7所示的对话框中输人质量和转动惯量。
转动惯量是刚体动力学中的重要物理量,其定义是:刚体内所有质点的质量与该质点到旋转轴距离的平方的乘积之和,其量纲是ml。刚体转动惯量的大小,表明了刚体运动状态改变的难易程度。当外力系对旋转轴的力矩一定时,转动惯量越大,转动状态的变化就越小;而转动惯量越小,转动状态的变化就越大。
对于如图7-8所示的质点p,其转动量的计算公式为:
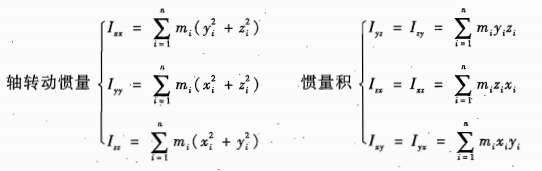
由上述表达式可以看出,轴转动惯量必为正值,而惯量积可以是正值、负值或0。由于转动惯量的大小与所选取的坐标轴有关,因此在定义过程中一定要指定坐标轴。在图 7-7 所示的对话框中,默认的坐标系是全局坐标系。
在 part 功能模块中,单击●(query)按钮,选择 volume properties,在窗口底部提示区中可以选择相对精度的大小(如图7-9所示),单击done按钮,信息区中就会给出部件的体积(volume)、形心坐标和惯性矩的查询结果(如图7-10所示)。
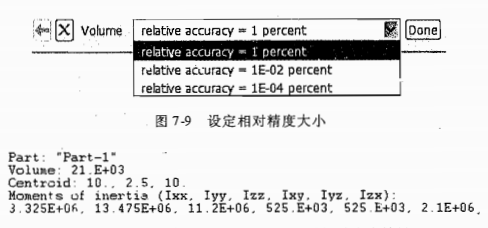
图7-9设定相对精度大小
在动态分析中,一般情况下都应把边界条件和载荷定义在刚体的质心上,因此在定义刚体参考点时,应使其位于质心。
(内容、图片来源:《abaqus有限元分析常见问题解答》,侵删)
凯发网站的版权与免责声明:
凡未注明作者、来源的内容均为转载稿,如出现凯发网站的版权问题,请及时联系凯发网站处理。我们对页面中展示内容的真实性、准确性和合法性均不承担任何法律责任。如内容信息对您产生影响,请及时联系凯发网站修改或删除。






-
[abaqus] 如何查看abaqus/standard 分析作业的运行状态
2024-07-05
-
2024-07-05
-
[abaqus] abaqus调整从面节点坐标造成的单元异常
2024-07-05
-
2024-07-04
-
2024-07-04
-
[abaqus] abaqus无法为模型成功划分六面体(hex)单元网格,应
2024-07-04
-
2024-07-03
-
2024-07-03
-
[abaqus] abaqus新增的自底向上网格划分技术有什么优点?有何注意
2024-07-03
-
[abaqus] abaqus划分网格时,在什么情况下需要使用分割(part
2024-07-02
-
2023-08-24
-
[abaqus] abaqus如何建模?abaqus有限元分析教程
2023-07-07
-
2023-08-29
-
[abaqus] 有限元分析软件abaqus单位在哪设置?【操作教程】
2023-09-05
-
[abaqus] 如何准确的评估真实行驶工况条件下的空气动力学性能
2020-11-19
-
[abaqus] abaqus单位对应关系及参数介绍-abaqus软件
2023-11-20
-
[abaqus] abaqus里面s11、s12和u1、u2是什么意思?s和
2023-08-30
-
[abaqus] abaqus软件教程|场变量输出历史变量输出
2023-07-18
-
2023-07-26
-
[abaqus] abaqus软件中interaction功能模块中的绑定接
2023-07-19
-
[有限元知识] 汽车座椅的热行为:利用powerflow仿真来增强热舒适度
2024-06-27
-
2024-06-07
-
[有限元知识] abaqus软件分析指南394:涉及孔隙流体压力的程序
2024-06-06
-
[有限元知识] abaqus软件分析指南393:热通量与涉及热自由度的程序
2024-06-06
-
[有限元知识] abaqus软件分析指南392:涉及机械自由度的程序
2024-06-06
-
[有限元知识] abaqus软件分析指南391:参数研究结果
2024-05-30
-
[有限元知识] abaqus软件分析指南390:参数化研究设计的生成和执行
2024-05-30
-
2024-05-30
-
[行业资讯] 可持续创新|行业首家“国家级工业设计中心”的发展秘笈
2024-05-29
-
[行业资讯] 上课啦!达索cst核心模块及emc仿真培训(深圳站)即将开
2024-05-29
-
 汽车交通
汽车交通 -
 风能电源
风能电源 -
 船舶机械
船舶机械 -
 生物医疗
生物医疗
-
 土木建筑
土木建筑 -
 新能源
新能源 -
 高科技
高科技



地址: 广州市天河区天河北路663号广东省机械研究所8栋9层 电话:020-38921052 传真:020-38921345 邮箱:thinks@think-s.com



凯发k8官方网娱乐官方 copyright © 2010-2023 广州思茂信息科技有限公司 all rights reserved. 粤icp备11003060号-2