行星轮传动机构因其结构紧凑、轻量化、高传动比、高效率和平稳传动等特点,在汽车行业中得到了广泛应用,特别是在现代混合动力汽车中,行星齿轮系统更是成为了主流选择。对于商用车而言,行星轮系统主要应用于减速机系列,以实现扭矩的高效传递。当前,一些大扭矩变速箱的设计也在探索主箱采用平行轴齿轮,副箱则采用行星轮系结构,以应对更大扭矩的传递需求。
随着行星轮系统的广泛应用,对行星齿轮的设计和校核也提出了更高的要求。然而,传统的校核方法已难以满足对行星轮系齿轮的精确校核,尤其是在解决如直齿行星轮系产生轴向力等复杂问题时显得力不从心。因此,引入有限元分析方法对行星轮系统进行齿部应力动态分析显得尤为重要。这种方法不仅能够提供更准确的应力分布数据,还能帮助工程师们深入理解行星轮系的工作机理,对今后行星轮的设计和校核具有重要的指导意义。
行星轮工作原理
行星轮机构的基本原件指的是太阳轮、行星架和内齿圈这三个元件,行星轮起到纽带作用,它联系着三元件,是速度分析和受力分析的关键[5]。行星轮机构中,太阳轮到齿圈力矩的传递经过一次齿轮外啮合,一次内啮合,方向改变一次。在行星轮中,根据相对运动学原理:
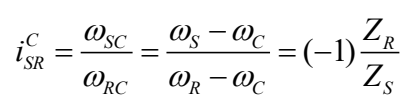
式中:
——太阳轮转速、内齿圈转速、行星架转速;
——z s、 zr ——太阳轮齿数、内齿圈齿数;
——csr i ——太阳轮、齿圈相对行星架的传动比
令k=zs/zr,k为行星齿轮的特性参数,则式(1)可简化为:

式(2)即为行星轮机构的运动学方程,该式表明内齿圈的转速r是太阳轮转速s和行星架转速c带行星齿轮参数系数的线性和。
行星轮模型及前处理
有限元分析的第一步是模型的建立,在建模过程中能否真实的反应实体模型的几何特点和结构特征关系到有限元分析结果是否准确。
常规齿轮包含齿向和渐开线修形,行星轮系的太阳轮经常因轴向力等问题,设计一定的螺旋角修形,而现有齿轮模型多不带修形量,故本文采用基本蜗杆砂轮磨齿方法进行齿轮建模[6]。基于matlab生成齿面曲线,使用creo建立精确齿轮对三维模型,模型及齿轮参数表1所示。
简化行星轮模型,为方便划分六面体网格,简化内齿圈结构,将行星轮齿坯部分和轮齿分开。内齿圈、行星轮齿部和太阳轮齿部划分六面体网格,行星架、行星轮齿坯划分四面体网格,如图1所示。啮合齿的网格均为六面体网格,有利于计算速度和准确性。
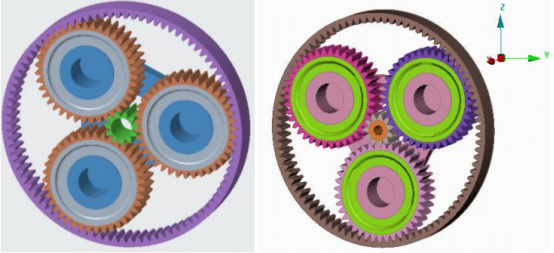
图 1 行星轮模型及网格单元
行星轮啮合仿真分析
行星轮采用准静态分析方法,按照整箱实验工况加载,在太阳轮中心施加一定转角,行星架输出花键施加反向扭矩,分多个时间步迭代计算,完成基于abaqus的齿轮啮合仿真。行星轮不同于常规齿轮,单个太阳轮与行星轮的啮合力受其他两对啮合副影响,即任一时刻三对齿轮传递载荷不均等,同一时刻三个行星轮最大弯曲应力也略有差别。
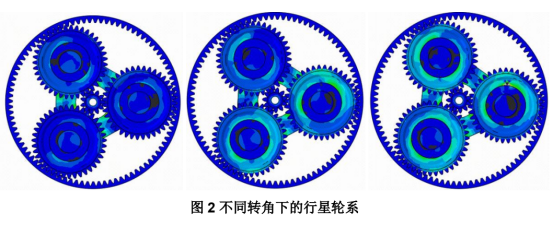
图 2 不同转角下的行星轮系
提取行星轮最大弯曲应力需考虑不同时刻下,3个行星齿轮分别与太阳轮和内齿圈啮合的最大应力值,数据量较大,在此筛选出几个较大应力时刻,如图3所示。
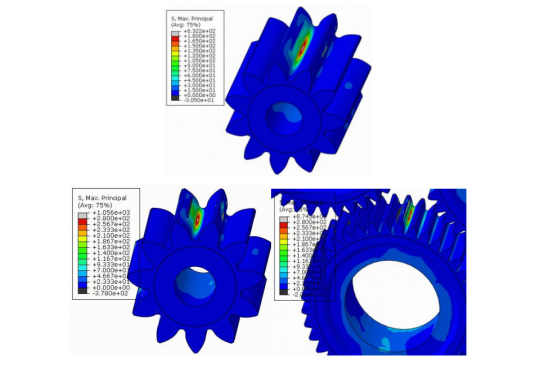
图 3 不同转角下的齿根应力
因行星轮系齿轮啮合次数多于平行轴齿轮,其载荷谱也较为复杂,从齿轮疲劳方面考虑,建议设计行星轮齿根应力小于常规齿轮。图示太阳轮最大弯曲应力为289mpa,行星轮最大弯曲应力为295mpa,均满足齿轮无限寿命要求。
太阳轮和行星轮精确建模,模型充分考虑所设计的修形量,可确保有限元分析不发生偏载现象。abaqus内置应力简单计算功能,可通过累积齿面最大接触应力,提取齿面接触斑应力云图,图4示出为太阳轮和行星轮的齿面接触斑。
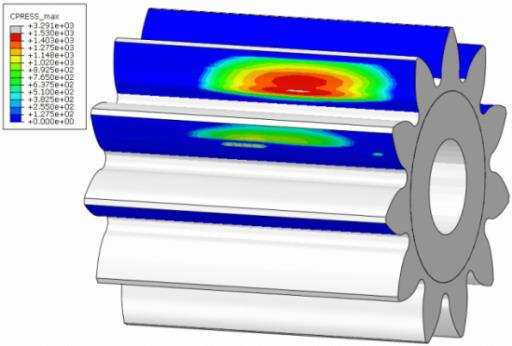
图 4 太阳轮接触斑
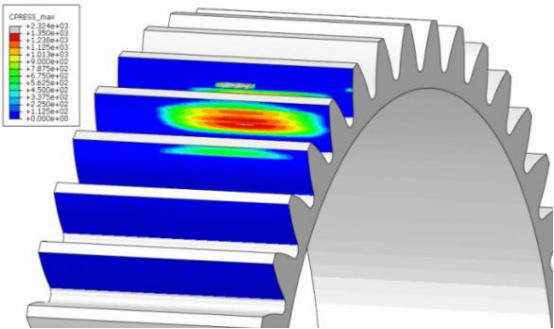
行星轮接触斑
行星轮的传扭方式决定其容易发生偏载,因此往往设计较大的鼓形量,图示可看出太阳轮和行星轮的接触斑偏齿面右侧,基本符合接触斑要求,但因太阳轮鼓形量较大,齿轮啮合并未完全使用整个齿面,造成应力集中。建议设计方可减小齿向的鼓形量设计,增加一定齿向斜度修形,既可以确保齿面接触斑移至齿面中心,也可使接触应力有所降低。
从接触斑中易提取太阳轮最大接触应力为1547mpa,行星轮与太阳轮接触齿面最大应力约为1366mpa,均满足强度要求。
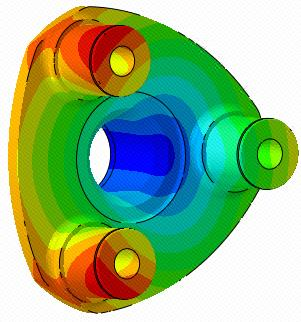
图 5 行星架扭转变形
本文所选行星架为单侧支撑,行星架扭转刚度较弱,仅适用于传递较小扭矩。若加载扭矩过大,则会导致行星架产生较大扭转变形,进而使行星轴上直齿轮啮合错位,产生一定轴向力。为消除直齿行星轮系轴向力,在设计初应校核行星架扭转刚度,确保其在运转时不产生扭转变形。
行星轮啮合仿真分析
本文结合某款减速机行星轮结构,对其运动特性进行分析,并基于有限元完成行星轮齿
部分析动态应力,分析结论如下:
1)各行星齿轮在同一时刻承载不同,有限元计算齿根弯曲应力应使用动态或准静态方
法,分析不同时刻各行星轮的最大弯曲应力值,进而筛选出较大应力值;
2)有限元分析所用太阳轮和行星轮应采用精确模型,较大鼓形量可确保齿轮啮合不发
生偏载现象,但也会造成齿轮接触区域有限,建议可适当增加一定齿向斜度修形;
3)行星架扭转刚度不足,易导致行星轮系统扭转变形,进而产生轴向力,建议对新设
计行星架进行足够的强度和扭转刚度校核。