ale自适应网格频率和强度控制指南虽然默认值适用于许多问题,但困难的分析可能需要更频繁的自适应啮合频率或具有更高强度的合。
瞬态分析指南
对于没有空间自适应网格约束或欧拉边界区域的问题,自适应网格划分的默认频率为10,网格扫描的默认数量为1。对于低到中等速率的动态问题和经历中度变形的准静态过程模拟,默认值通常是足够的。如果网格扫描的频率或数量太低,多余的单元失真可能会导致分析在网格适应之前终止;或者,如果可以获得凯发网站的解决方案,它可能不会像使用更高质量的网格获得的凯发网站的解决方案那样精确。然而,在几乎所有情况下,与纯拉格朗日分析相比,在任何频率上执行自适应啮合都将减少元素的失真(从而提高解的质量)。
对于高速率的冲击问题进行大量的变形,它可能是必要的,以增加自适应网格划分的频率或网格扫描的数量。只要平流扫掠的数量保持较小,在增加频率之前稍微增加网格扫掠的数量通常花费较少。
对于涉及爆炸发生在仅仅几百个增量的问题,自适应网格通常需要在每一个增量。对于每增加一次流量的准静态过程模拟,也可能需要增加自适应合的频率。
对于每个增量的变形很小的问题,可以通过每25-100个增量执行自适应网格划分来保持高质量的网格。对于这些问题,自适应网格划分的额外成本可以忽略不计。
稳态分析指南
当一个自适应网格区域包含欧拉边界区域或具有空间自适应网格约束时,自适应网格划分的默认频率为1。此默认频率是保守的,选择此默认频率主要是因为空间网格约束仅在自适应网格增量期间应用。因此,自适应网格增量之间的网格可能会从其规定的位置漂移,这可能会影响凯发网站的解决方案。然而,自适应网格约束的漂移总是会在下一个自适应网格增量中被消除:它不会累积。
对于变形速度或材料从一个单元到另一个单元的流动速度远小于材料波速度的问题,频率通常可以增加到5或更高。这类问题包括大多数稳态过程模拟,其中网格从指定位置的漂移在几个增量中可以忽略不计。通过较少地执行自适应网格划分,稳态模拟成为
与其对应的瞬态模拟相竞争。对于欧拉域中的变形或材料流动的速度是高的,如在动态冲击问题,应使用默认频率为1。
网格平滑方法
abaqus/explicit中新网格的确定基于四个方面。您可以通过定义自适应网格控件来控制这些方面。已经选择了默认值,这样整个算法在大多数问题上都能很好地工作。
首先,在abaqus/explicit的新的网格的计算是基于一些组合的三个基本的平滑方法:体积平滑,拉普拉斯平滑,等位线平滑。在自适应网格域中的每个节点上应用平滑方法,根据周围节点或元素的位置确定节点的新位置。虽然所有的平滑方法都倾向于平滑网格并减少元素失真,但所产生的网格将因所使用的方法而异。
第二,如果需要的话,可以以牺牲单元变形为代价来维持初始单元灰度。第三,在基本的平滑方法应用之前,优化节点的位置可以提高网格的质量和最小化所需的自适应网格的频率。
最后,使用依赖于凯发网站的解决方案的网格细化附近区域的不断发展的边界曲率。这就抵消了基本平滑方法的发展趋势,即在求解精度很重要的凹边界附近减少网格细化。
体积平滑
体积平滑通过计算节点周围元素中心的体积加权平均值来重新定位节点。在图/中,节点m的新位置是由周围四个元素的中心c的位置的体积加权平均值确定的。体积加权将倾向于将节点从单元中心c1推向单元中心c3,从而减少单元失真。
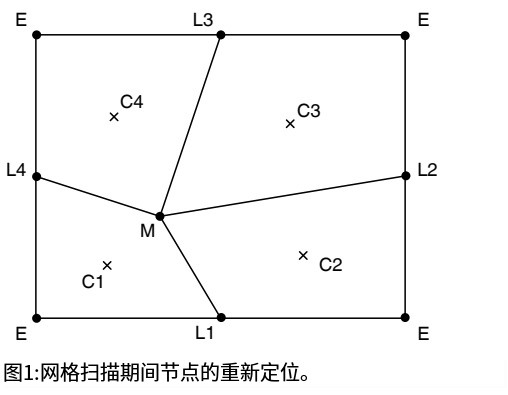
网格扫描期间节点的重新定位
体积平滑非常稳健,是abaqus/explicit中的默认方法。它适用于结构化和高度非结构化的域。(结构化域是指不包含退化元素,且每个节点在二维空间中被4个元素包围,或在三维空间中被8个元素包围的域。)
拉普拉斯平滑
拉普拉斯平滑通过计算由一个元素的边缘连接的每个相邻节点的位置的平均值来重新定位一个节点。在图/中,节点m的新位置由平均通过元素边缘连接到m的四个节点l的位置。节点l2和l3的位置将拉节点m向上和向右以减少元素失真。
拉普拉斯平滑算法是最便宜的平滑算法,常用于网格预处理器中。对于低至中度扭曲的网格域,拉普拉斯平滑的结果是类似的体积平滑。对于具有复杂曲率边界的域,体积平滑通常会导致更平衡的网格。
温馨提示:
此文档为达索官方英文文档翻译,尽管我们已经尽力确保准确性,但在翻译过程中可能会有一些错误或细微差别。如果想要了解官方原版,可联系客服进行索取。